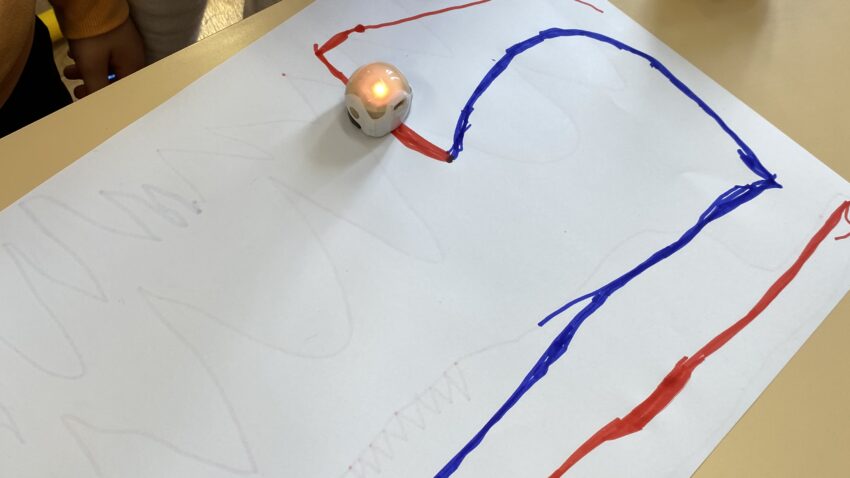
Nous avons eu une mallette avec des robots suiveurs de ligne appelés « Ozobot ».
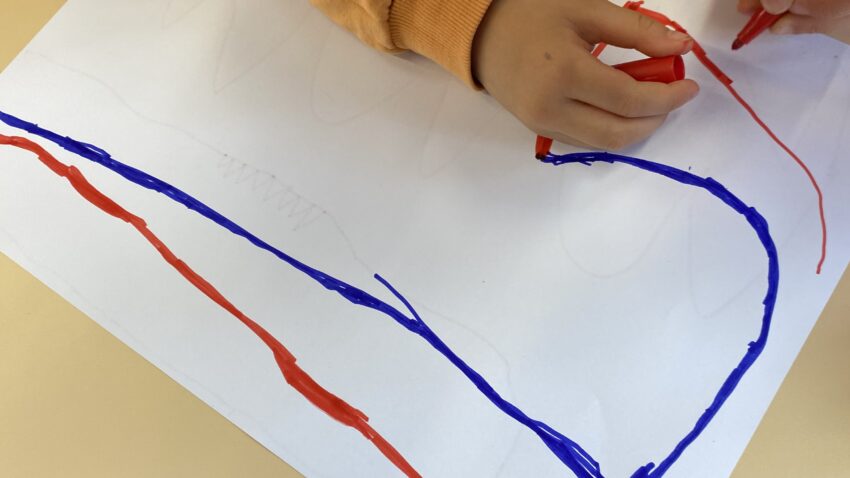
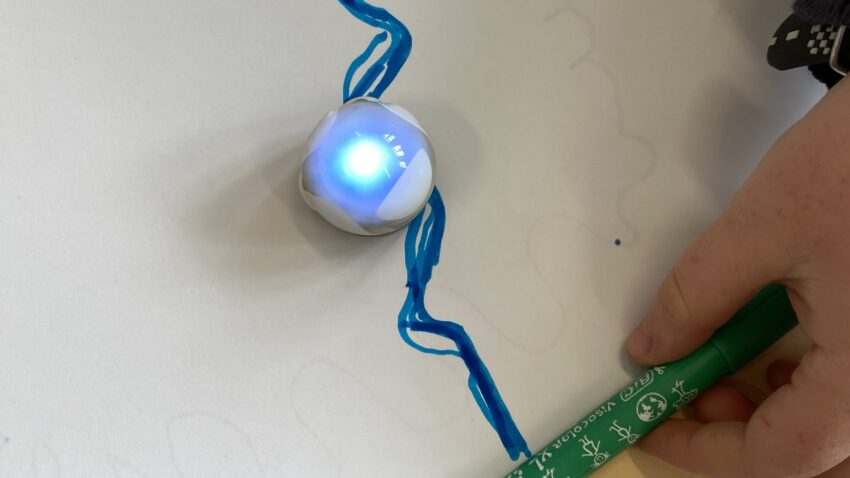
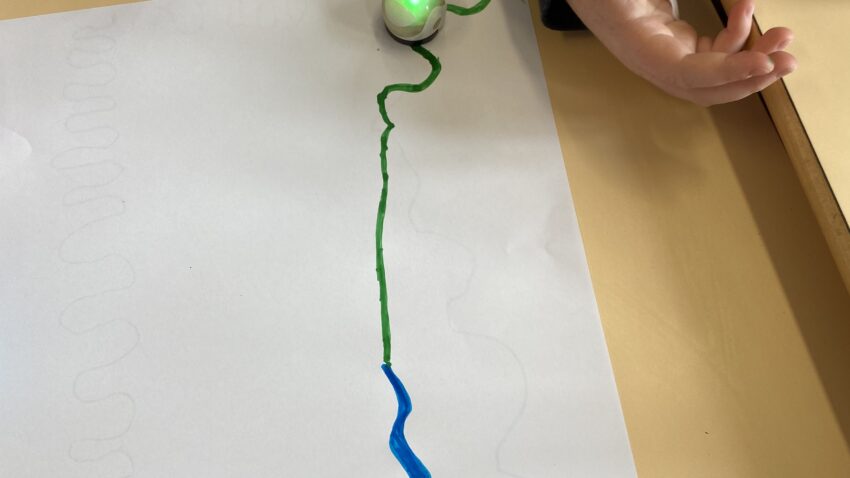
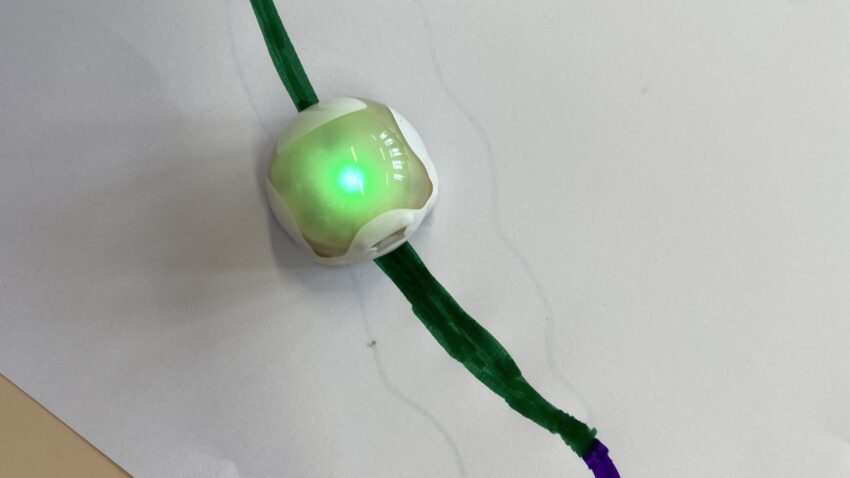
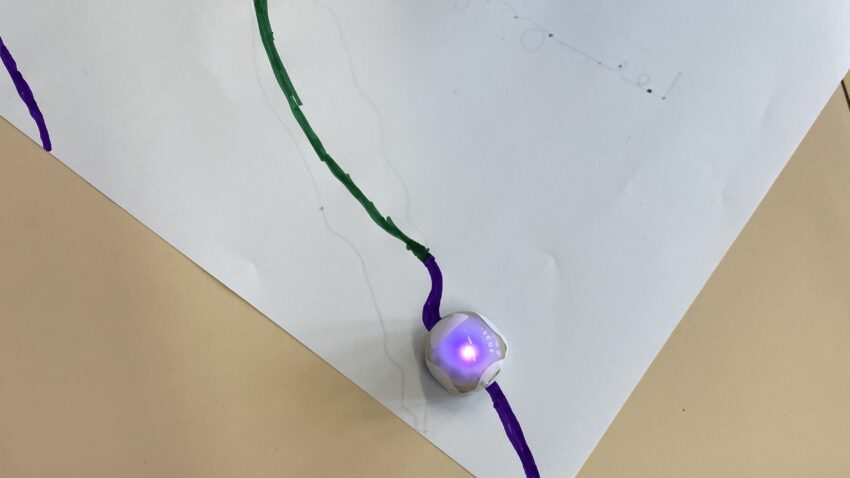
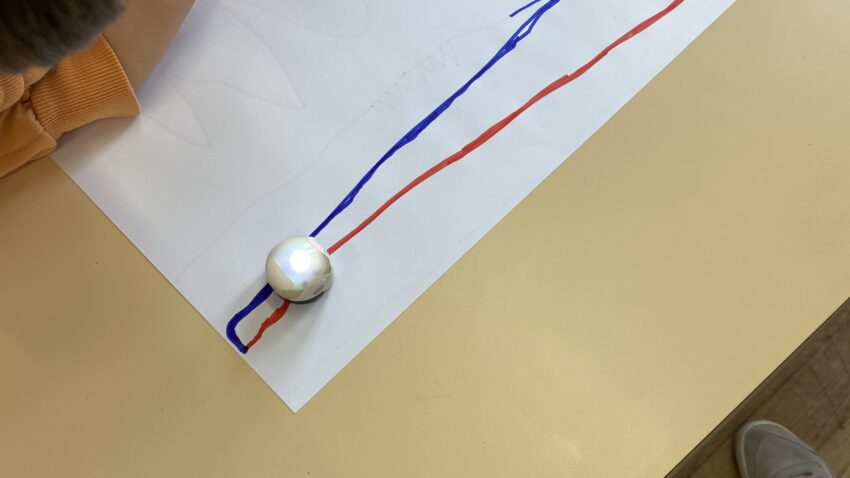
Nous avons d’abord vu que l’Ozobot prenait la couleur du trait sur lequel il était. Les couleurs claires ne fonctionnent pas.
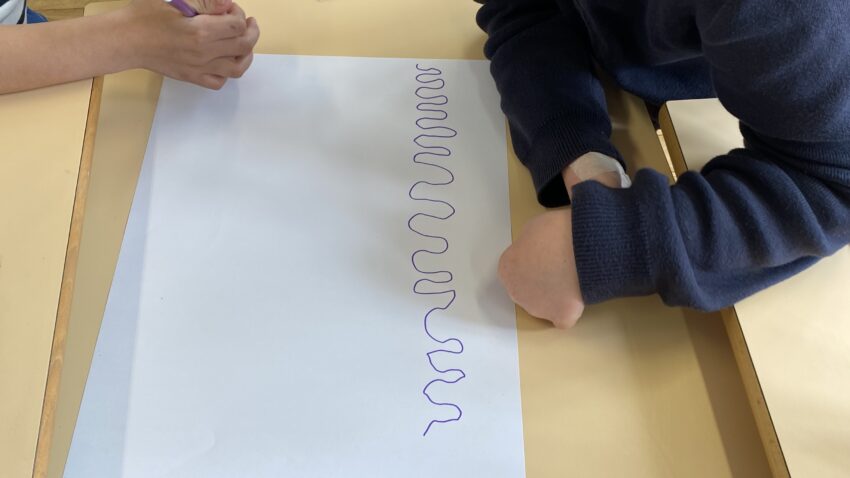
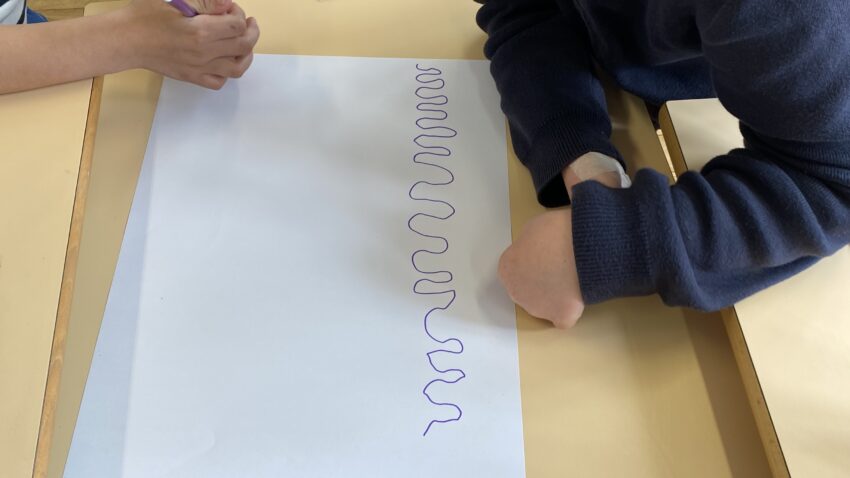
Ensuite, nous avons constaté qu’il fallait que le trait soit suffisamment épais pour que le robot le détecte avec ses capteurs.
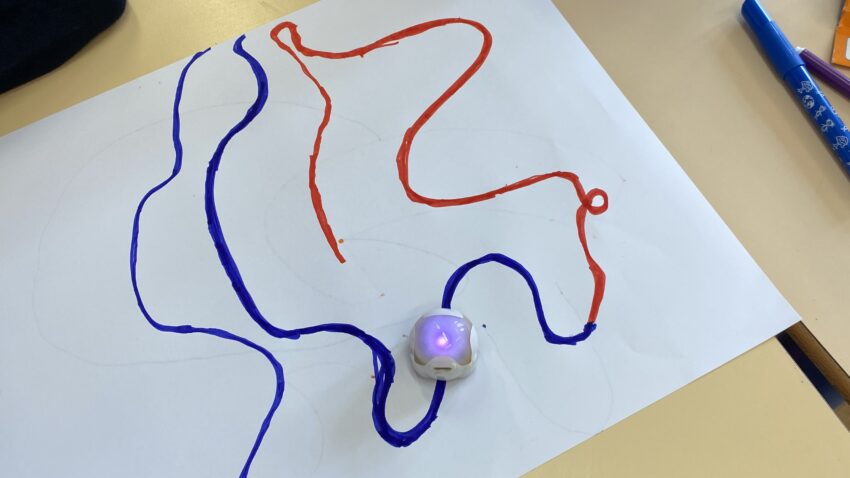
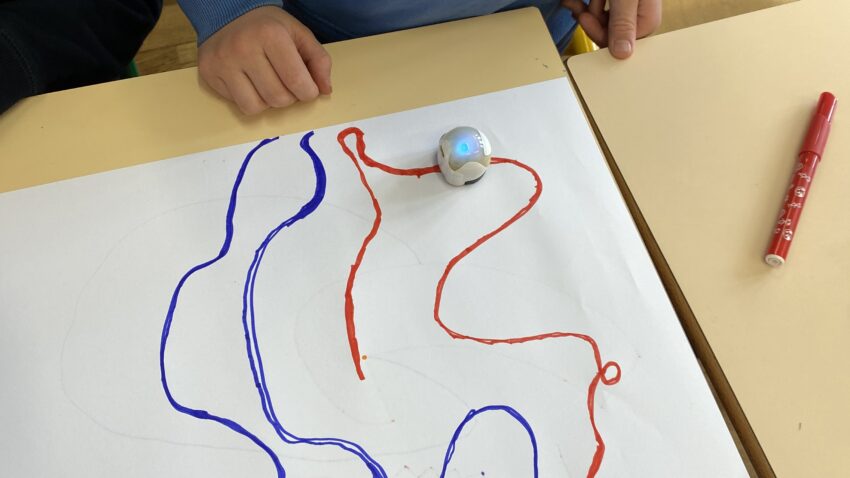
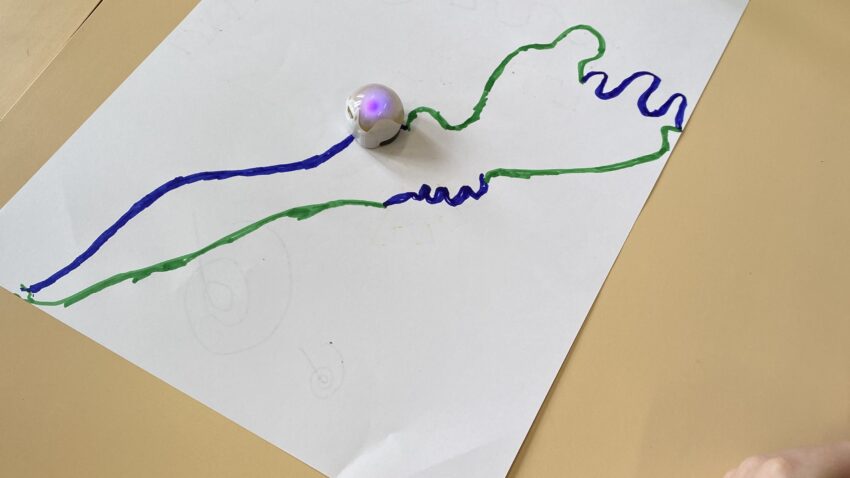
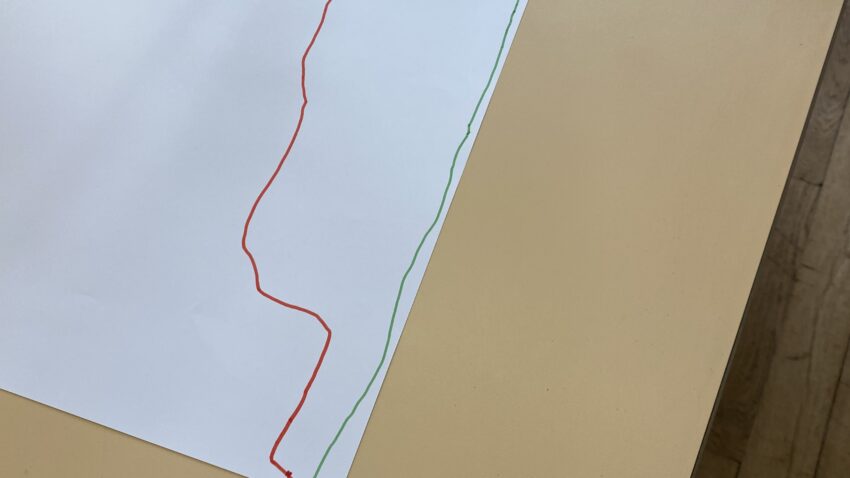
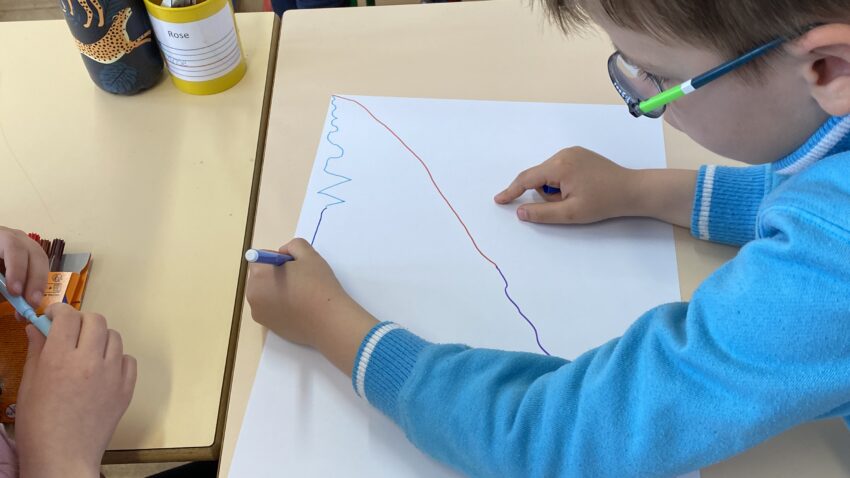
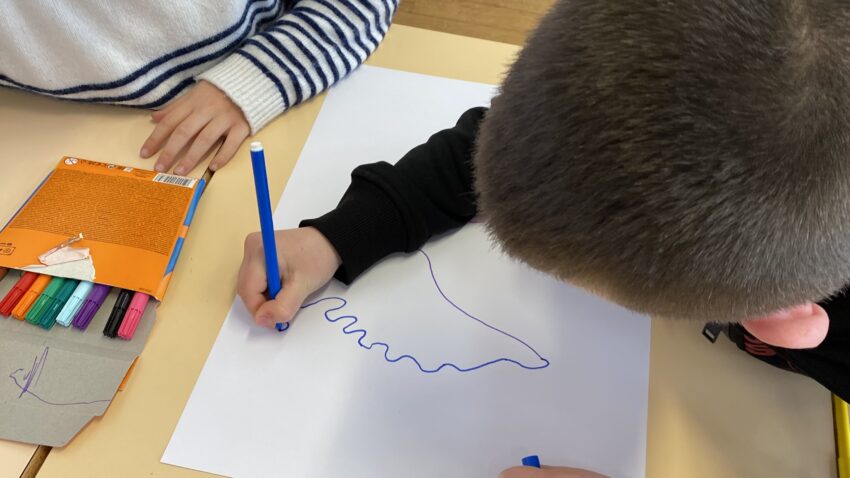
Nous avons ensuite testé différents graphismes simples pour qu’il suive un parcours. Les graphismes trop compliqués, trop étroits ou trop serrés ne sont pas forcément détectés par Ozobot. 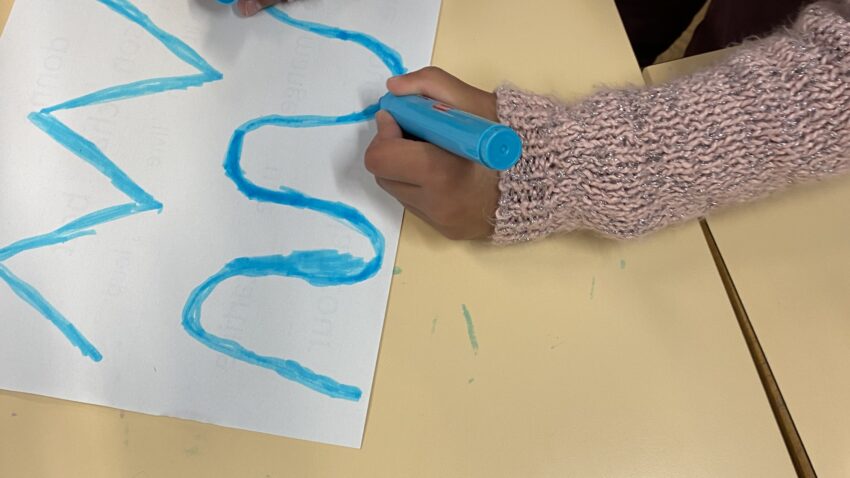 IMG_6018
IMG_6018